 Click for a bigger JPEG image.
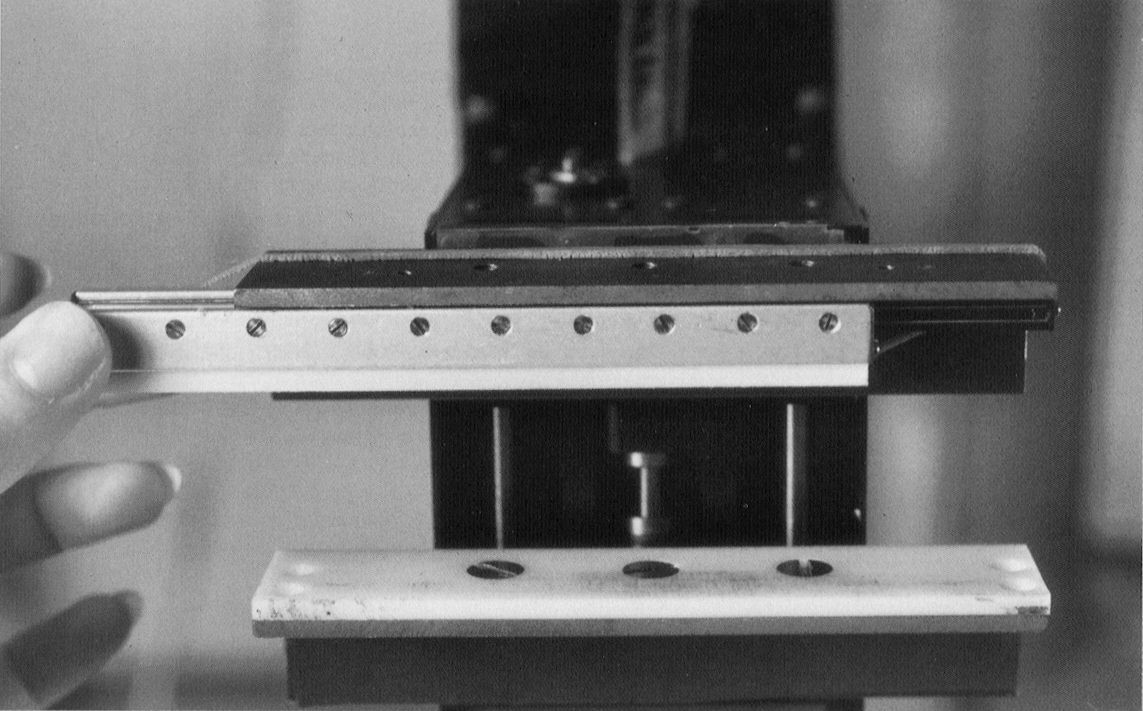
Click for a bigger JPEG image.Figure 2: The "frictionless" gripper. Click here to see the patent.
The parts-feeding mechanism consists of a frictionless parallel-jaw gripper that can be oriented, opened and closed (Figure 2). The main feature of this gripper is that objects are never cocked between the jaws. We achieve low friction in the plane of the part but high friction orthogonal to the part by mounting a sliding plate (linear bearing) on one jaw. The inner surface of both jaws is covered with a high-friction material such as rubber. Although zero friction is impossible in a physical mechanism, it turns out that the natural vibration of the gripping mechanism is sufficient to dislodge potentially cocked configurations.
Click for a bigger JPEG image.
Figure 2: The "frictionless" gripper. Click
here to see the patent.
A squeeze action is the combination of orienting the gripper, closing the jaws as far as possible, and then opening the jaws. Note that no sensing is required. The linear bearing operates passively, responding to mechanical forces that arise during grasping (Figure 3). A spring can be added to center the bearing between grasps without impeding the action of the gripper, since forces arising from the spring will be dominated by the gripping force as the jaws are closed. We also add a damper so that the spring-loaded bearing will not rotate parts as the jaws are opened.
 Click for an MPEG animation.
Click for an MPEG animation.
Click Here for a description by the author.
Figure 3: Time sequence of grasping with a frictionless gripper. (1) As the two outer jaws close over a typical part (hex nut), horizontal forces cause the sliding jaw to translate to the right (2) until the part is gripped in a stable configuration (3). (Based on a drawing by Ben Brown).
Note that a single bearing is sufficient to reduce friction between the jaws so that the part will tend to rotate into a stable configuration. One fixed jaw insures that the part will not continue to translate after the part reaches a stable configuration. The frictionless gripper does not constrain the lateral motion of circular parts.